
Shivam Goel
Ph.D. Candidate · Neuro-symbolic AI, RL & Robotics
I am a Ph.D. candidate in Computer Science at Tufts University, specializing in robotics and artificial intelligence. My research focuses on neuro-symbolic AI and reinforcement learning for open-world robotics. I envision a future where autonomous robots handle the unexpected and can efficiently learn, adapt, and improve by observing our daily lives. Not just tools, but lifelong collaborators in our homes and workplaces.
Research
My research aims to advance AI and robotics for open-world environments, where novelty, uncertainty, and unstructured interactions are the norm. A central focus is force-space manipulation, grounding policies in physical interaction and object-centric representations to transfer across robot embodiments. By combining learning, planning, and structured object models, I build frameworks and algorithms that unify high-level reasoning with low-level control aiming toward autonomous robots that thrive in dynamic real-world settings.
learning for handling novelty in open-world environments.
Hybrid reasoning systems combining symbolic planning with neural learning.
NovelGym and evaluation frameworks for open-world agents.
Reinforcement learning for articulated object manipulation using force-space policies.
Transferring policies from simulation to real robots with minimal retraining.
Learning predictive models of the world for improved robot decision-making.
Publications
Google ScholarProjects
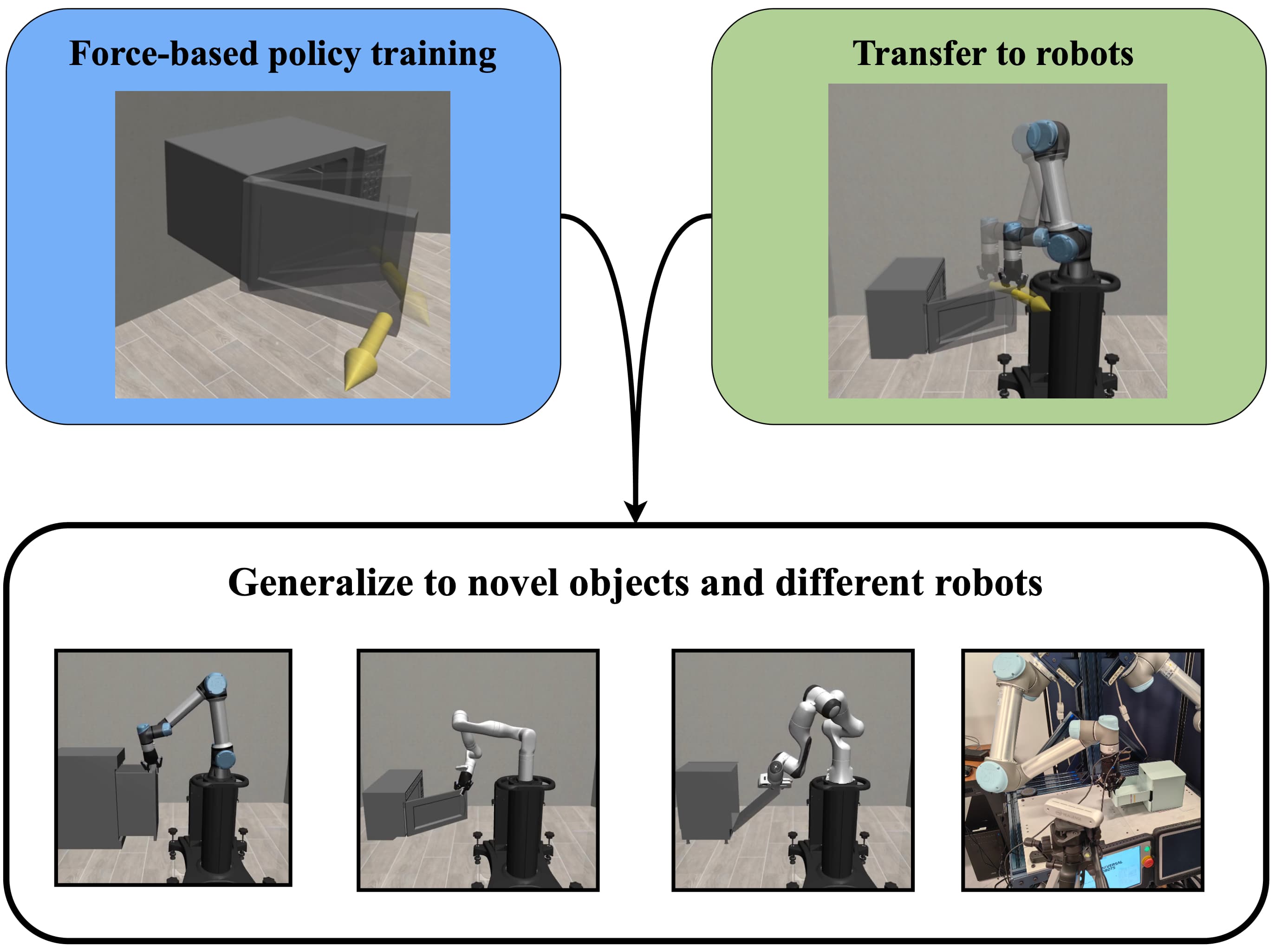
Robot-agnostic policies; sim→real (Spot/UR5/Panda/Kinova).
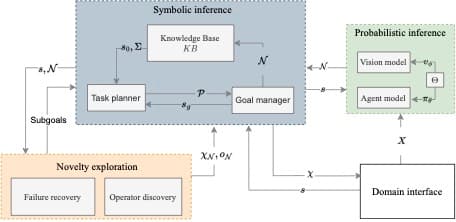
Reasoning + RL for novelty detection, adaptation, and recovery.
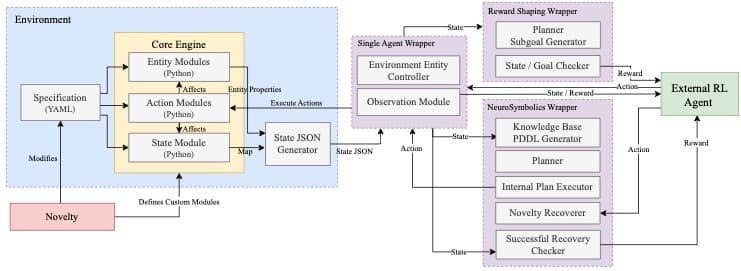
NovelGym and evaluation suites for hybrid planning+RL agents.